Programmes à réaliser sur mBlock
- Programme n°1 : faire clignoter (1s) une DEL RGB (1 ou 2) en rouge 10 fois de suite.
- Programme n°2 : Identique à P1 mais faire clignoter les 2 DEL RGB en alternance.
- Programme n°3 : Utiliser une condition et le détecteur de lumière pour faire fonctionner le P2.
- Programme n°4 : Utiliser le capteur de luminosité pour créer une alarme.
- Programme n°5 : Il ne s'exécutera qu'une seule fois.Le robot avance durant 3 secondes à la vitesse 100. Puis il s'arrête.
- Programme n°6 : Dissocier la vitesse des moteurs ; Le robot tourne en rond 3s (sens horaire) puis 3s (sens trigonométrique) 2 fois de suite
- Programme n°7 : Le robot avance s'il se trouve à moins de 25 cm d'un obstacle. S'il voit un obstacle devant lui à moins de 10 cm, il recule, tourne à droite et reprend son avance.
- Programme n°8 : Suivre une piste à l'aide du Module de suivi de ligne à infrarouge
Conseil
L'objectif est de manipuler tous les actionneurs et les capteurs du robot Mbot.
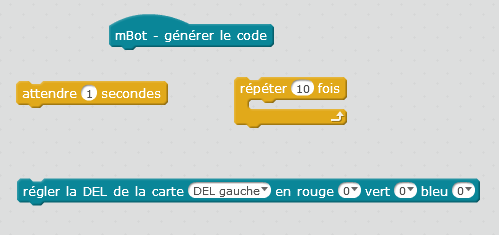
Programme n°1 : faire clignoter (1s) une DEL RGB (1 ou 2) en rouge 10 fois de suite.⚓
Méthode⚓
- Réaliser une boucle et mettre à l'intérieur Allumer la del.
- Attendre 1s
- Éteindre la del
- Attendre 1s
- Programmer la boucle pour qu'elle fasse le programme 10 fois
Programme n°2 : Identique à P1 mais faire clignoter les 2 DEL RGB en alternance.⚓
Méthode⚓
- Réaliser une boucle et mettre à l'intérieur Allumer la del 1 éteindre la del 2
- Attendre 1s
- Éteindre la del1 allumer la del2
- Attendre 1s
- Programmer la boucle pour qu'elle fasse le programme 10 fois
Truc & astucePour éteindre une DEL, il faut mettre les valeurs de rouge, vert et bleu à 0⚓

ComplémentÉléments nécessaires⚓
Identique au P1 + Un module pour Régler la del n°2
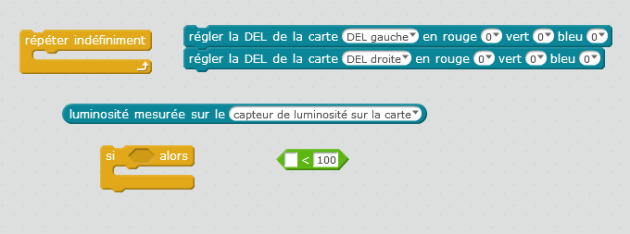
Programme n°3 : Utiliser une condition et le détecteur de lumière pour faire fonctionner le P2.⚓
Méthode⚓
Avant la boucle du P2, Ajouter :
Une condition Si ( il se passe ceci) alors
Ici l'événement déclencheur est la baisse de la lumière mesurée sur la carte en dessous de 100 lux.
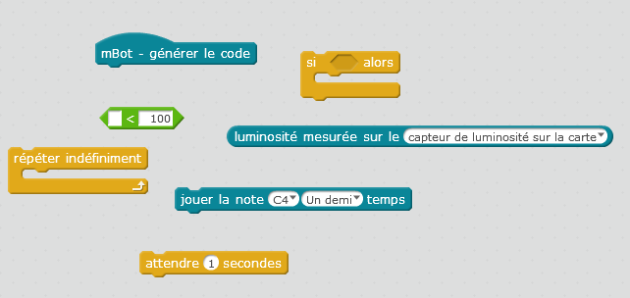
Programme n°4 : Utiliser le capteur de luminosité pour créer une alarme.⚓
Méthode⚓
Utiliser la condition si alors/sinon
Une condition Si ( il se passe ceci) alors
Ici l'événement déclencheur est la baisse de la lumière mesurée sur la carte en dessous de 100 lux
Jouer la note de l'alarme sur le buzzer
Sinon
Ne pas jouer de note
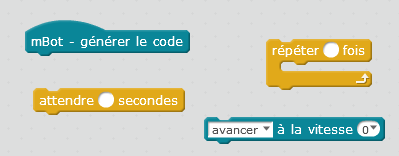
Programme n°5 : Il ne s'exécutera qu'une seule fois.Le robot avance durant 3 secondes à la vitesse 100. Puis il s'arrête.⚓
Méthode⚓
Réaliser une boucle et mettre à l'intérieur :
- Avancer le robot à vitesse 100
- Attendre 3s
- Avancer le robot à vitesse 0
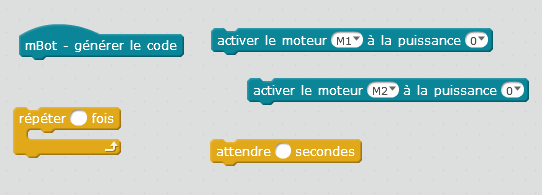
Programme n°6 : Dissocier la vitesse des moteurs ; Le robot tourne en rond 3s (sens horaire) puis 3s (sens trigonométrique) 2 fois de suite⚓
Méthode⚓
Réaliser une boucle et mettre à l'intérieur :
- Faire tourner la roue gauche seule
- Attendre 3s
- Faire tourner la roue droite seule
- Attendre 3s
- Arrêter les moteurs
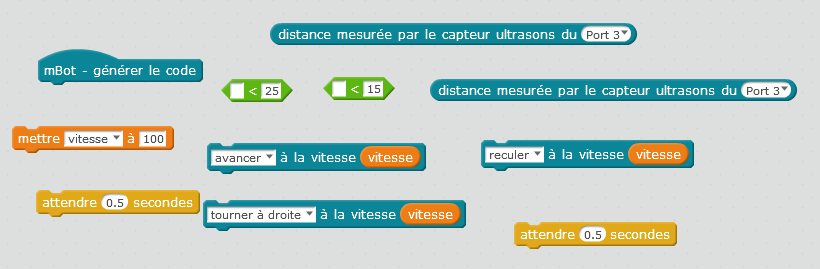
Programme n°7 : Le robot avance s'il se trouve à moins de 25 cm d'un obstacle. S'il voit un obstacle devant lui à moins de 10 cm, il recule, tourne à droite et reprend son avance.⚓
Méthode⚓
- Régler la vitesse à 50 ( utiliser une variable)
- Réaliser une boucle infini
- Si la distance < 10 reculer pendant 0,5s puis tourner à droite pendant 0,5s
- Si la distance < 25 avancer
- Sinon ne pas avancer
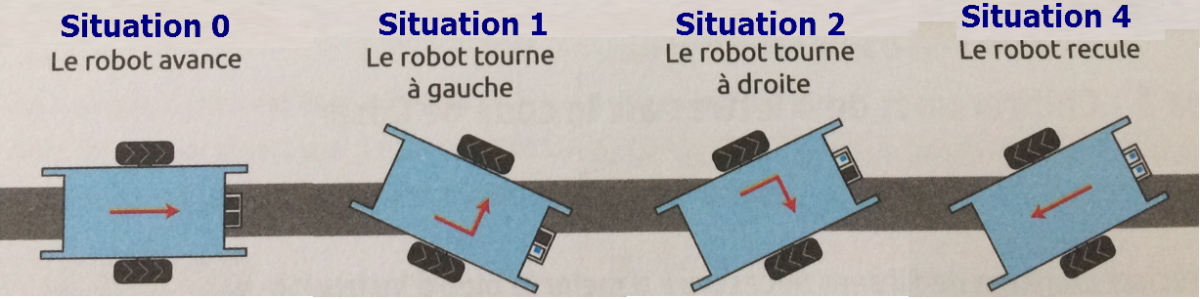
Programme n°8 : Suivre une piste à l'aide du Module de suivi de ligne à infrarouge⚓
Méthode⚓
- Régler la vitesse à 100 ( utiliser une variable)
- Réaliser une boucle infini
- Si lecteur ligne côté droit et gauche sur noir ; avancer
- Si lecteur ligne côté droit sur noir et côté gauche sur blanc ; tourner à droite
- Si lecteur ligne côté droit sur blanc et côté gauche sur noir ; tourner à gauche
- Si lecteur ligne côté droit et côté gauche sur blanc ; reculer
Utiliser des boucles SI ... ALORS ... SINON ...
Truc & astuceLes différentes situation du suiveur de ligne⚓