Notion de Mécanisme et de Solides
Définition :
On appelle mécanisme, un ensemble de pièces mécaniques reliées entre elles par des liaisons, en vue de réaliser une fonction déterminée.
Nous admettrons que les pièces mécaniques peuvent être modélisées par des solides indéformables.
Exception : les pièces dont la fonction est de se déformer (ressorts, joints, etc...)
Fondamental : Solide indéformable
Le solide indéformable possède une masse constante et un volume dont les limites sont invariantes quelles que soient les actions extérieures auxquelles il est soumis.
Exemple : la bielle du micromoteur est supposée indéformable ↔ la distance entre ses points A et B est constante . | 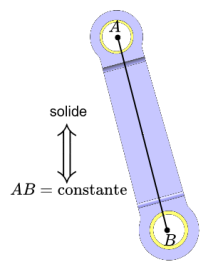 |
Paramétrage de la position d’un solide
Pour connaitre la position de tous ses points dans l’espace, il suffit de connaitre la position d’un repère lié à ce solide.
Notons |  |
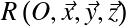

La position du solide dans l’espace, est déterminée par 6 paramètres indépendants :
Position du point O1 dans R : 3 coordonnées
Orientation de
 par rapport à
par rapport à  : 3 angles
: 3 angles
Fondamental : Degré de liberté d’un solide
On appelle « libertés » d’un solide par rapport à un référentiel, les mouvements indépendants de ce solide pour passer d’une position à une autre.
Il existe deux mouvements élémentaires entre les solides :
Le mouvement de TRANSLATION (RECTILIGNE) : les trajectoires de tous les points du solide sont des droites parallèles.
Le mouvement de ROTATION : les trajectoires de chaque point sont des cercles coaxiaux.
ATTENTION : Pour définir un mouvement, il est nécessaire de fixer une référence. La notion de mouvement est toujours relative : c’est le mouvement d’un système par rapport à un référentiel (ici défini par le repère R).
On dit que le solide possède des degrés de liberté, chacun contrôlés par :
Soit un paramètre de position linéaire = translation
Soit un paramètre de position angulaire = rotation
Exemple :
Par exemple, dans un repère ![]() , on pourra les noter :
, on pourra les noter :
Tx, Ty et Tz pour translations selon les axes
 ,
,  et
et 
Rx, Ry et Rz pour rotations autour des axes
, et
Remarque :
Un solide possède au maximum 6 degrés de liberté et au minimum 0.
Le schéma cinématique, à quoi ça sert ?
Définition :
Par définition, un mécanisme est composé de plusieurs sous ensembles reliés entre eux par une ou plusieurs liaisons.
|  |
Des exemples…
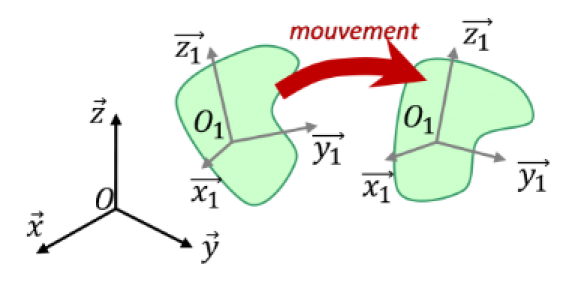
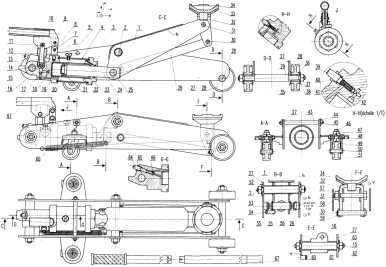
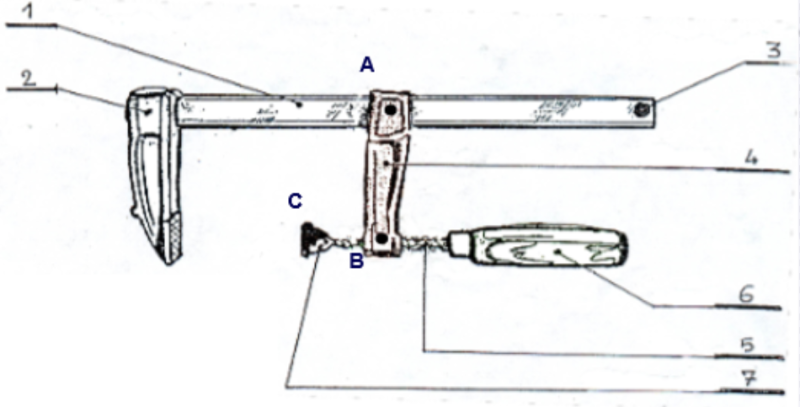
Exemple : Le serre-joint
Exemple : Un étau
La Liaison encastrement
Fondamental :
Nom de la liaison | Degrés de liberté | Mouvements relatifs | Représentation normalisée | ||
|---|---|---|---|---|---|
Vues planes | Perspective | ||||
Encastrement | 0 | 0 | Translation(s) |
|
|
0 | Rotation(s) | ||||


Simulation :
La liaison pivot
Fondamental :
Nom de la liaison | Degrés de liberté | Mouvements relatifs | Représentation normalisée | ||
|---|---|---|---|---|---|
Vues planes | Perspective | ||||
Pivot | 1 | 0 | Translation(s) |
|
|
1 | Rotation(s) | ||||

Simulation :
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger le média.
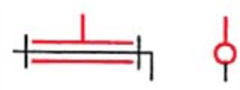
La liaison glissière
Fondamental :
Nom de la liaison | Degrés de liberté | Mouvements relatifs | Représentation normalisée | ||
|---|---|---|---|---|---|
Vues planes | Perspective | ||||
Glissière | 1 | 1 | Translation(s) |
|
|
0 | Rotation(s) | ||||

Simulation :
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger le média.
La liaison hélicoïdale
Fondamental :
Nom de la liaison | Degrés de liberté | Mouvements relatifs | Représentation normalisée | ||
|---|---|---|---|---|---|
Vues planes | Perspective | ||||
Hélicoïdale | 1 | 1 | Translation(s) |
|
|
1 | Rotation(s) | ||||
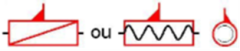

Remarque :
La liaison hélicoïdale ne permet qu'un seul degré de liberté puisque les 2 mouvements relatifs ne sont pas indépendants.
On dit qu'ils sont conjugués.
Simulation :
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger le média.
Le pivot glissant
Fondamental :
Nom de la liaison | Degrés de liberté | Mouvements relatifs | Représentation normalisée | ||
|---|---|---|---|---|---|
Vues planes | Perspective | ||||
Pivot glissant | 2 | 1 | Translation(s) |
|
|
1 | Rotation(s) | ||||
Simulation :
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger le média.
La liaison sphérique à doigt
Fondamental :
Nom de la liaison | Degrés de liberté | Mouvements relatifs | Représentation normalisée | ||
|---|---|---|---|---|---|
Vues planes | Perspective | ||||
Sphérique à doigt | 2 | 0 | Translation(s) |
|
|
2 | Rotation(s) | ||||


Simulation :
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger le média.
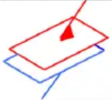
La liaison appui plan
Fondamental :
Nom de la liaison | Degrés de liberté | Mouvements relatifs | Représentation normalisée | ||
|---|---|---|---|---|---|
Vues planes | Perspective | ||||
Appui plan | 3 | 2 | Translation(s) |
|
|
1 | Rotation(s) | ||||

Simulation :
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger le média.
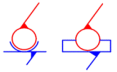
La liaison rotule
Fondamental :
Nom de la liaison | Degrés de liberté | Mouvements relatifs | Représentation normalisée | ||
|---|---|---|---|---|---|
Vues planes | Perspective | ||||
Rotule | 3 | 0 | Translation(s) |
|
|
3 | Rotation(s) | ||||


Simulation :
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger le média.
La liaison linéaire annulaire
Fondamental :
Nom de la liaison | Degrés de liberté | Mouvements relatifs | Représentation normalisée | ||
|---|---|---|---|---|---|
Vues planes | Perspective | ||||
Linéaire annulaire | 4 | 1 | Translation(s) |
|
|
3 | Rotation(s) | ||||
Simulation :
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger le média.
La liaison linéaire rectiligne
Fondamental :
Nom de la liaison | Degrés de liberté | Mouvements relatifs | Représentation normalisée | ||
|---|---|---|---|---|---|
Vues planes | Perspective | ||||
Linéaire rectiligne | 4 | 2 | Translation(s) |
|
|
2 | Rotation(s) | ||||


Simulation :
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger le média.
La liaison ponctuelle
Fondamental :
Nom de la liaison | Degrés de liberté | Mouvements relatifs | Représentation normalisée | ||
|---|---|---|---|---|---|
Vues planes | Perspective | ||||
Ponctuelle | 5 | 2 | Translation(s) |
|
|
3 | Rotation(s) | ||||





Simulation :
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger le média.
Exemple
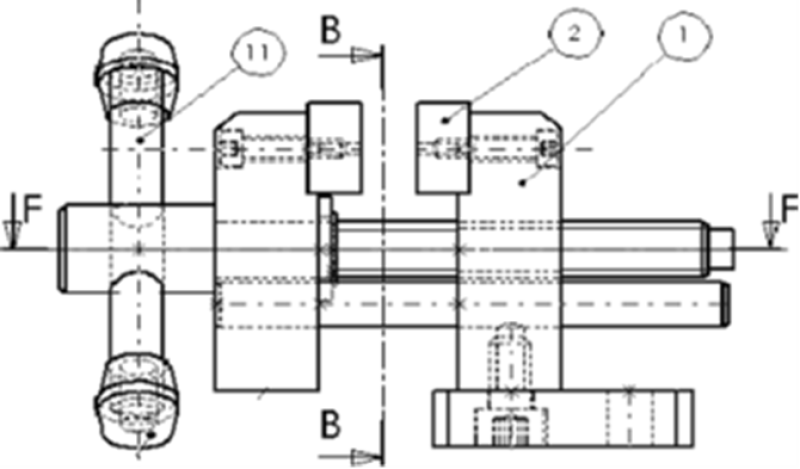
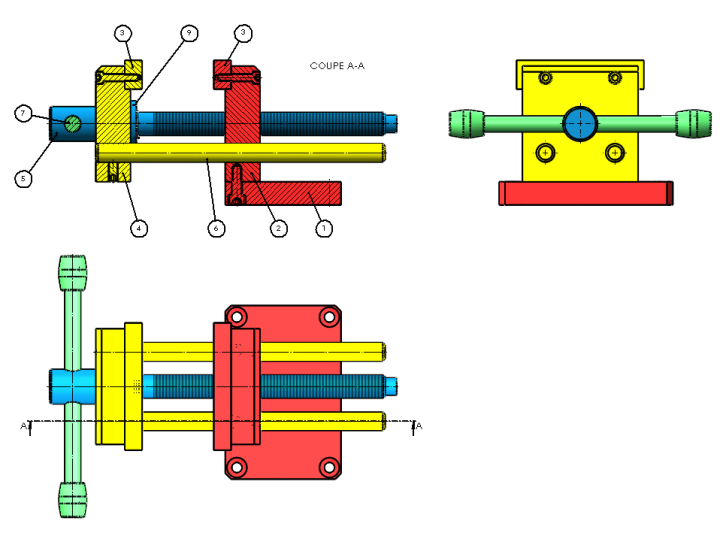
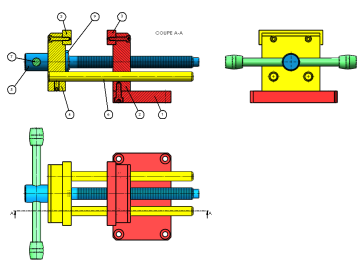
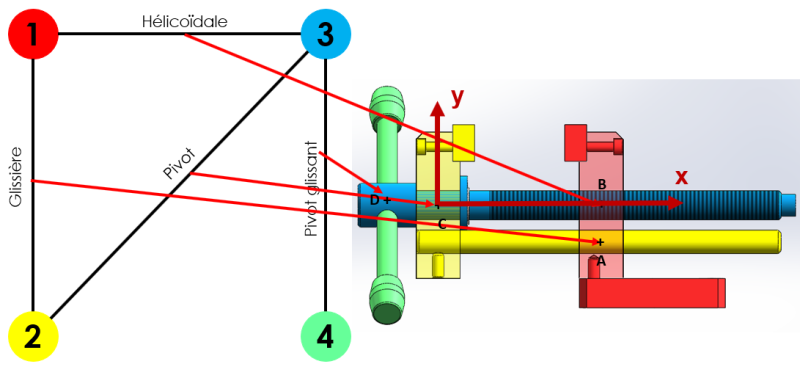
Exemple : Schéma cinématique d'un étau
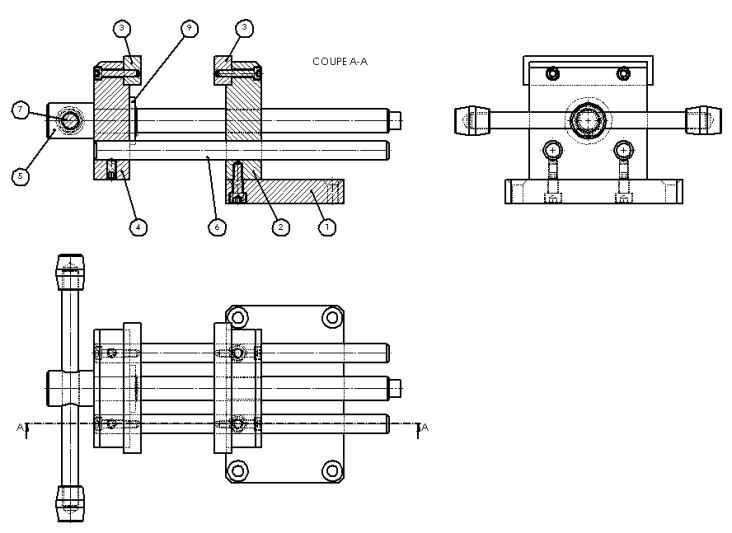
Simulation : Étape 1 : Repérer les groupes cinématiques
Ce repérage s’effectue en observant le plan d’ensemble ou le mécanisme lui-même s’il est à notre disposition. Sur le plan, la meilleure méthode consiste à colorier d’une même couleur les groupes de pièces en liaison encastrement.
Recenser les pièces de chaque groupe.
Groupe 1 : 1 ; 2 ; 3 5 (en rouge)
Groupe 2 : 3' ; 4 ; 6 (en jaune)
Groupe 3 : 5 ; 9 (en bleu)
Groupe 4 : 7 (en vert)
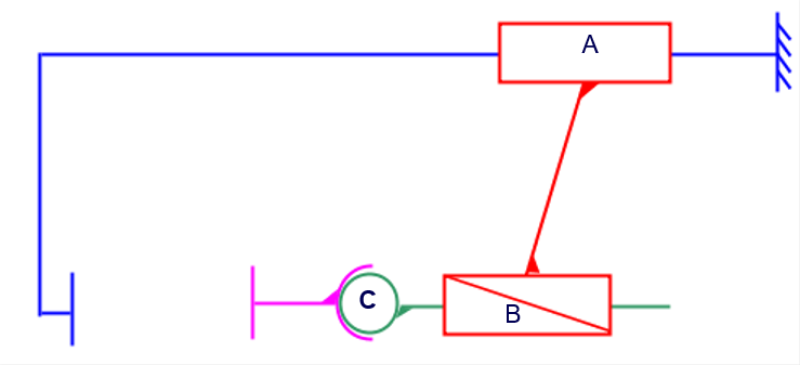
Simulation : Étape 2 : Établir le graphe des liaisons
Le graphe des liaisons a pour but d’établir les relations existant entre les groupes identifiés précédemment. On va donc, de manière systématique observer les contacts éventuels entre groupes.
 | Relier par un trait les groupes ayant des contacts quels qu’ils soient. |

Simulation : Étape 3 : Identifier les liaisons entre les groupes
Déterminer la nature du ou des contacts entre les groupes et/ou observer les degrés de liberté entre les groupes concernés.
En déduire la liaison normalisée correspondante (centre et axe).
(Cliquer sur l'image ci-dessous pour faire avancer l'animation)
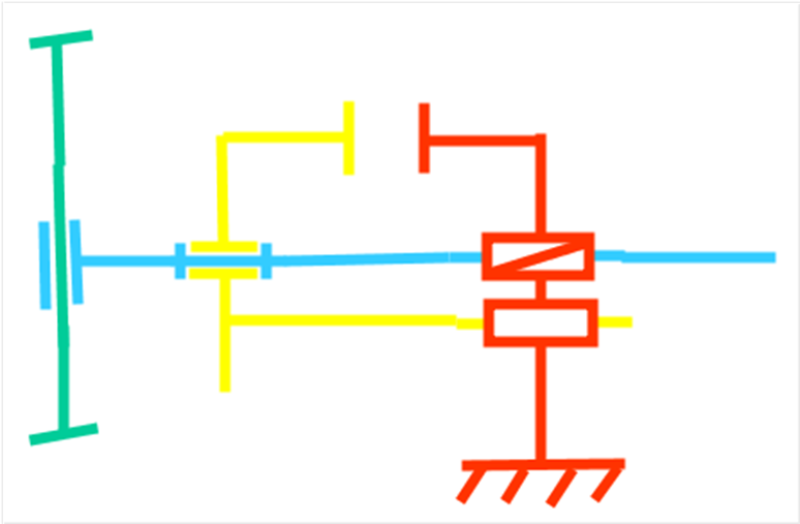
Simulation : Étape 4 : Construire le schéma cinématique
Choisir le point de vue le plus explicite pour le schéma (plan x,y).
Repérer la position relative des liaisons (au centre du contact réel)
Maintenant, vous n'avez plus besoin du plan…
Placer les liaisons sur les points identifiés précédemment.
Relier les liaisons entre elles en respectant les blocs (couleurs).
Terminer l'habillage du schéma.
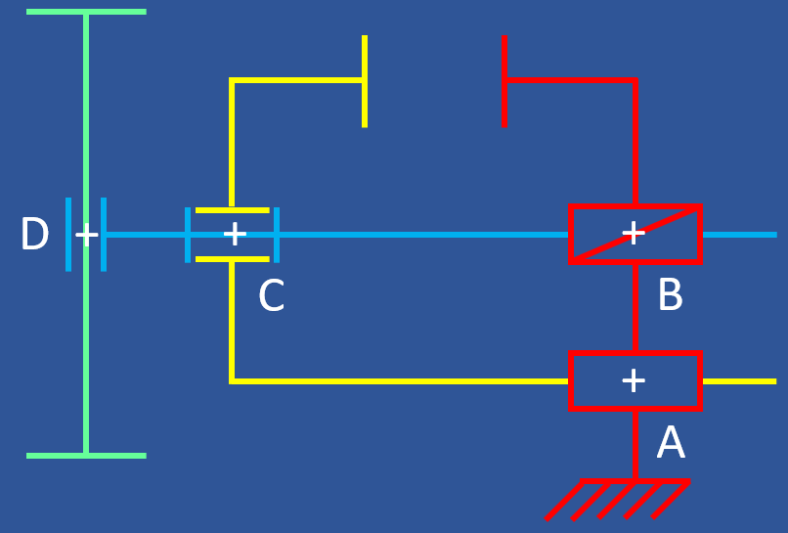
Votre schéma est terminé !
Modélisation des roulements
Principe
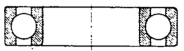
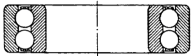
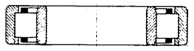
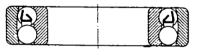
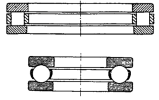
En fonction des indications de comportement fournies par les constructeurs, nous proposons de modéliser la liaison entre bague intérieure et bague extérieure des différents roulements de la manière suivante :
Type de roulement | Modélisation | ||
|---|---|---|---|
Désignation | Vue plan | Illustration | |
À billes |
|
| Rotule |
À deux rangées de billes |
|
| Pivot |
À rouleaux cylindriques |
|
| Linéaire annulaire |
À aiguilles |
|
| Pivot glissant |
À rotule |
|
| Rotule |
À rouleaux coniques |
|
| Rotule |
Butée à billes ou à rouleaux |
|
| Appui plan |









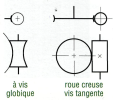
Modélisation des engrenages
Schématisations
La normalisation indiquée ci-dessous permet de représenter schématiquement les engrenages et les chaînes cinématiques usuelles.
Schémas cinématiques (normalisation) | |||
|---|---|---|---|
|
|
|
|
|
|
|
|
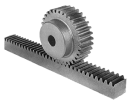
roue extérieure | roue intérieure | roue conique | roue et crémaillère |
|
|
|
|
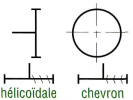
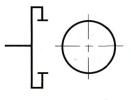
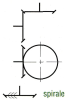
denture extérieure | denture intérieure | ||
|
|
|
|
engrenages droits | engrenages coniques | roue et vis sans fin | |